
性能优化学习笔记7
竞争与并行性
上一节我们对于cilk有一个认识,就是Cilk keywords 是授予并行执行的权限,它们并不要求并行执行。编译器可以选择不并行执行,而是按照顺序执行。这种选择是为了提高性能,因为并行执行有时候会带来额外的开销。在这一节中,我们将讨论一些并行执行的问题,包拋竞争和死锁。(就像爱情一样,强扭的瓜不甜,两个人最好是都有各自奋斗的目标 😎 )
Determinacy Races 确定性竞争
定义:两个逻辑上并行的指令访问同一个内存位置,并且至少有一个是写操作。
我们用一个cilk_for 引入确定性竞争:
1 | int x = 0; |
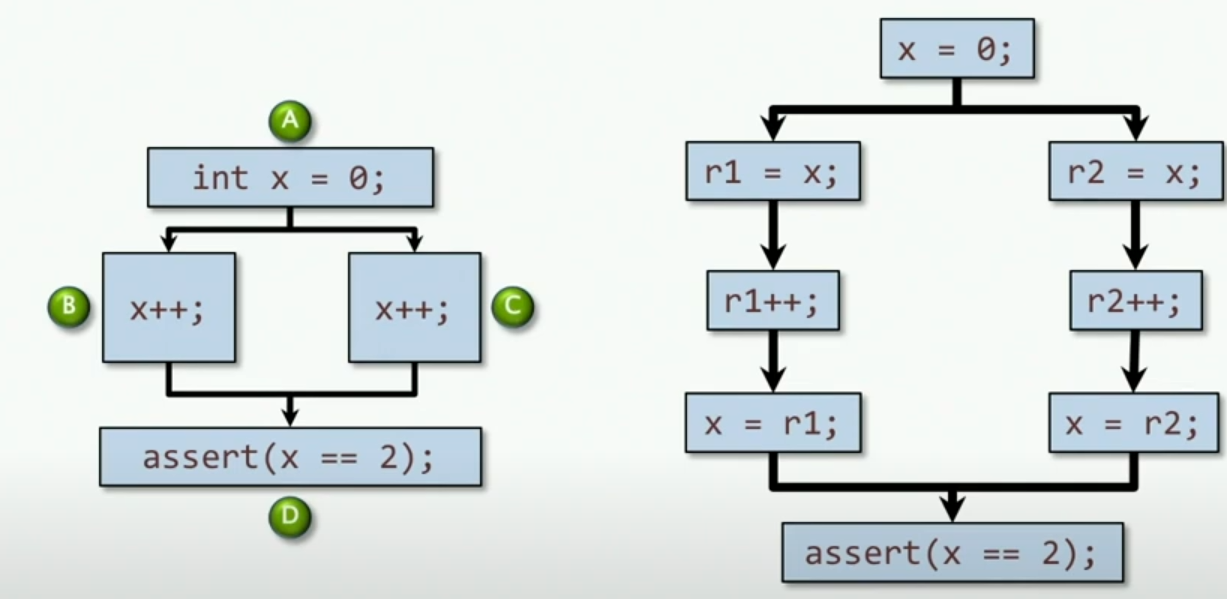
实际上,上述代码我们可以得到这样的图片,并且实际上执行increment操作是需要三步骤的,通过寄存器实现。因此,这样就会出现竞争,出现不同寄存器都要写入同一个位置的情况。那么对于执行的结果而言,不一定每次都是错误的,比如说我左边的那条路先跑完,然后再跑右边的路,这样就与顺序执行结果相同。
这样的竞争有两种:
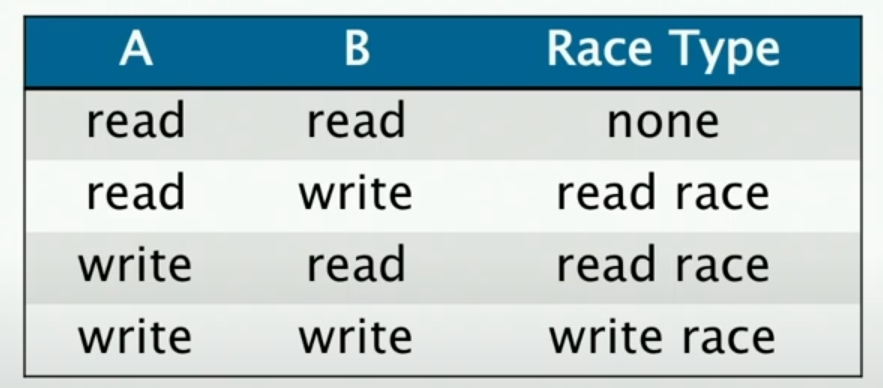
- 读竞争,我们不知道读的结果是不是正确的
- 写竞争,同理
我们定义两段代码是独立的,当且仅当它们之间没有确定性竞争。这样的定义是为了保证程序的正确性,因为我们不知道这样的竞争会不会导致错误的结果。
Avoiding Races
- cilk_for 中的迭代应该是独立的
- 在cilk_spawn 与 cilk_sync之间的子级代码应该要独立于父级代码,这也包括由生成的子级代码调用的子级执行代码
- 机器字的大小很重要!小心在packed data structures中的竞争
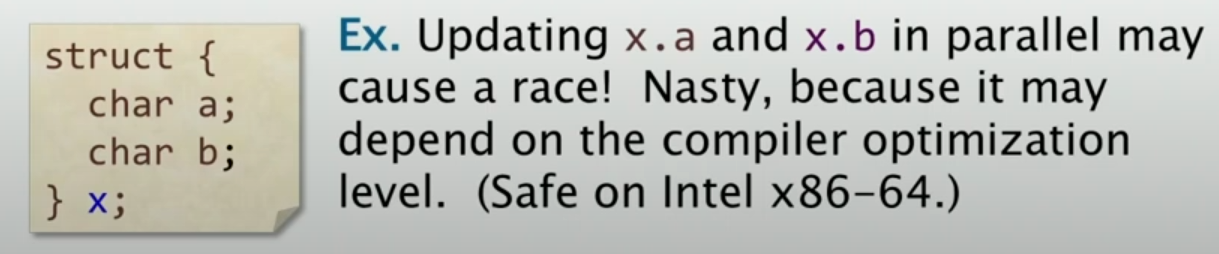
对于我们的英特尔机器,如果我们使用基本的数据类型比如字符、整型等等并不会出现竞争,但是如果使用非标准的类型——如果我们使用C的bit fields,并且该字段并不是标准大小之一,那么就可能遇到竞争
Cilksan Race Detector
我们可以通过 -fsanitize=cilksan 来检测竞争,这样可以启动cilk的竞争检测器,根据给定的输入检测并行情况下的结果与顺序执行的结果是否一致。并且给出可能存在竞争的内存位置,其根据程序员的输入来判断是否是竞争,报告这些竞争。
什么是并行性
现在我们重新审视一下并行性,我们还是从斐波那契数列例子开始:
1 | // cilk code for Fibonacci |
上述为clik的斐波那契数列代码实现,这里对不同的代码进行颜色编码,给出具体的执行流程图:
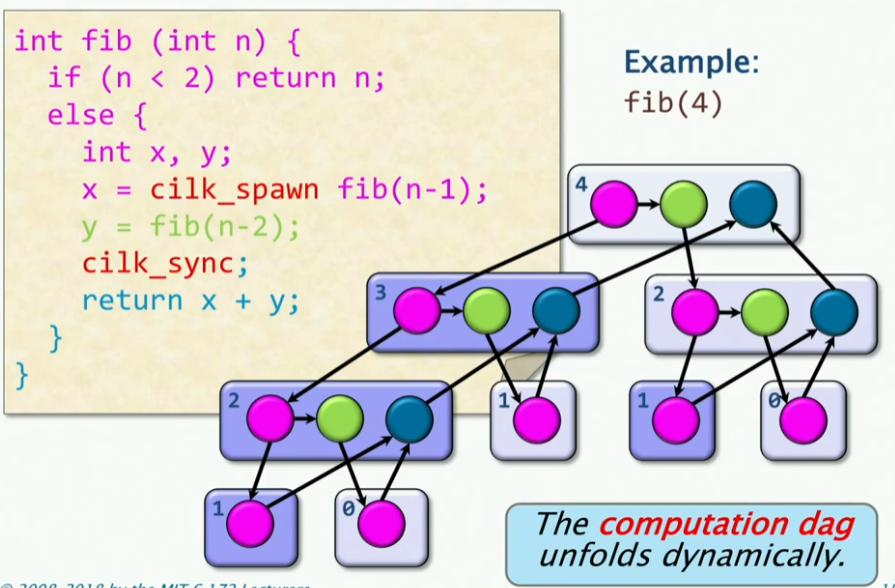
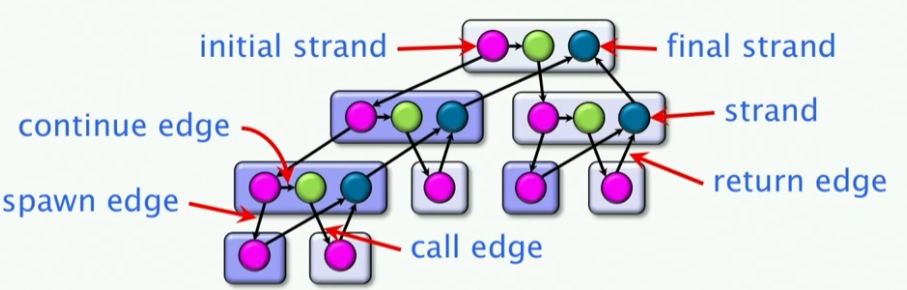
这样就引入了一张图,我们称为Computation Dag,这样的图可以很好的表示出并行性。我们定义如下:
一个并行的指令流是一个Computation Dag,也就是 G = (V, E). 这是一个有向无环图,其中每个节点代表一个指令,每个边代表一个依赖关系。如果一个节点的所有父节点都已经执行完毕,那么这个节点就可以执行。
- DAG图中每一个顶点对应于一条Strand,其是一个指令序列, Strand内部是串行的,Strand之间是并行的
- DAG图中的边,我们有spawn edges、call edges、return edges、continue edges
- spawn edges:表示一个strand的开始
- call edges:表示一个转到调用函数的边上
- return edges:表示一个strand的返回
- continue edges:表示一个strand的继续
- 并行循环(cilk_for)被转换为嵌套的spawns和syncs,使用的是分治递归的方法
我们假设上述图中每一个Strand,即链都是在一个单位时间执行完毕(不过现实中并不是这样,为了简单起见),那么这次计算的并行度是多少?
要回答上述的问题,我们首先得知道几个概念:
Amdahl’s law: 如果你的程序中有百分之50并行、百分之50串行,那么你的程序的加速比最多是2倍,不管你有多少核心。这句话很好理解,也就是说我百分之50的时间是在处理串行程序,如果我有无数的核心,串行程序的时间是不会变的,因此加速比最多是2倍。那么,推理到常规,如果程序中串行占比为$$\alpha$$,并行占比为$$1-\alpha$$,那么加速比为$$\frac{1}{\alpha + \frac{1-\alpha}{p}}$$,其中加速比的upper-bound是。其中p为核心数。
我们来计算下图的计算并行性:
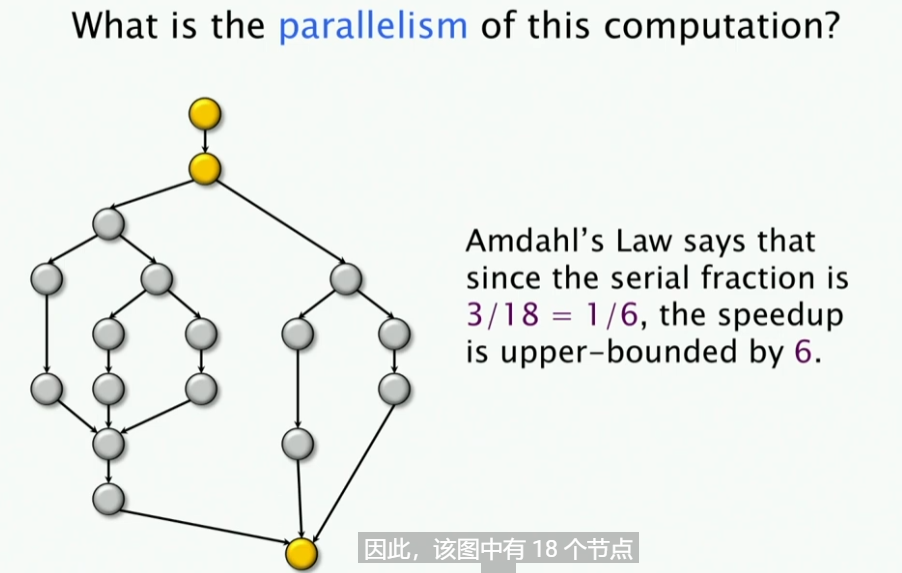
我们来看,这里有多少串行的点,这里有三个串行的节点。(除了这三个节点之外,其它的节点均在并行的路线上)因此,我们知道,这个串行的比例是1/6,因此其加速比的上限是6倍。
但是实际上上面的定义较为宽松了,其在实际上并没有什么那么有用,因此我们更进一步:
- 我们定义为程序在P个处理器上面的执行时间,并且我们定义为程序在一个处理器上面的执行时间,也就是工作时间,我们定义为work,即工作(比如上述节点一共有18个,因此我们定义work为18)
- 我们定义为span,即跨度,跨度也称为图的关键路径长度或者计算深度。这个等于图中找到的最长有向路径(上图中的span即9)
然后,我们有两个公式:
- Work Law
- Span Law
上述两个公式都是显然的。
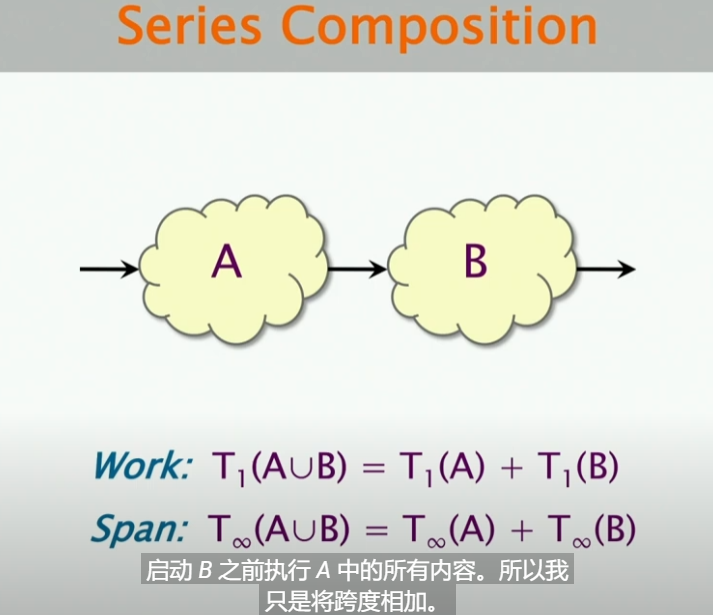
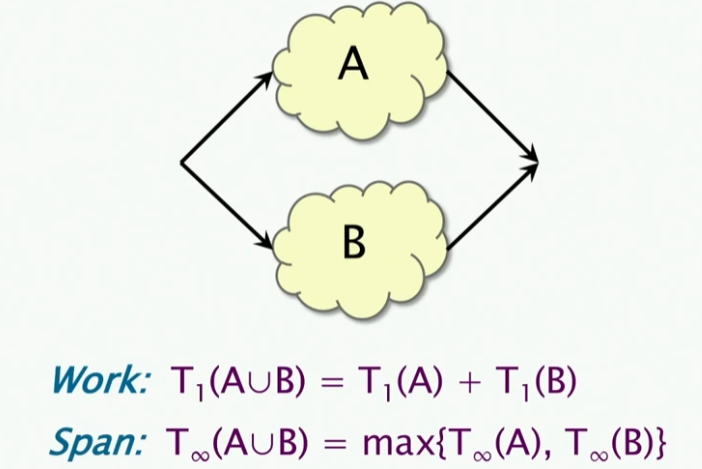
我们考虑串行的情况,不管是work还是span,A和B的联合都是其分开之和,这很好理解,因为我们要在B启动之前去启动A。而对于我们使用并行的情况下,其结论就不一样了:
- work的联合不变,因为你还是有那么多的工作要去做
- span的联合是取最大值,因为你要等待最长的那个时间
我们定义在P个处理器上的speedup=,如果这个值小于P,说明得到的是亚线性的加速比,如果这个值大于P,说明得到的是超线性的加速比。这个值是不可能大于P的,因为我们有Amdahl’s law,因此我们的加速比的上限是P,即线性加速比。那么我们可以得到最大的可能的加速就是:,所以上述图中,最大的计算比为2.
Quicksort Analysis
我们来看一个并行的快排的例子:
1 | static void quicksort(int64_t *left, int64_t *right) { |
可以很清楚地看见,上述的左边部分排序和右边部分的排序是可以并行的。因此我们使用cilk_spawn来实现并行。
现在有一个问题,就是我们假设我们分类的数目是100万,那么这里的并行度是多少?
我们使用Cilkscale来绘制出并行度(加速比与处理器数量的关系图),这张图是通过单个处理器上面的运行时间除以P个处理器上面的运行时间得到的。这个就是实际观察得到的加速比。
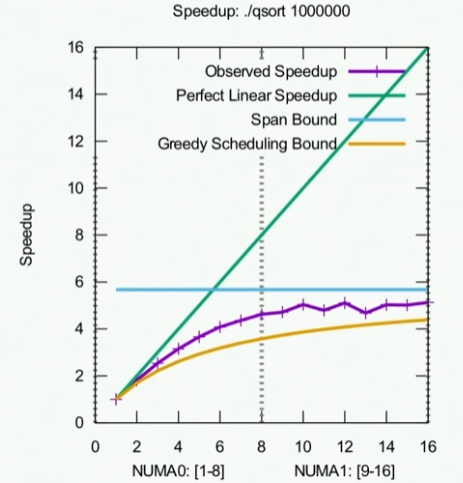
我们很容易知道上述蓝色的图线表示Span Bound即在有无限多的处理器上面,最大的加速比会是多少。这里的结果大概接近6;对于绿色的线,是根据work law 得出的,其实就是一条斜率为1的直线,我们的观测结果要在这两条线的下面。
至于为什么我们观测的结果是锯齿状的,我想是因为噪声的影响
但是如果我们实际上去计算这个值,我们对于预期的并行度计算如下:

实际上,上述计算还是有很多边界常数项的,我们只能说是Order of magnitude(数量级),但是我们可以看到,我们的实际观测值是符合预期的。
Scheduling Theory
不同的线程是如何映射到处理器的呢?我们来了解一下调度理论
Greedy Scheduling
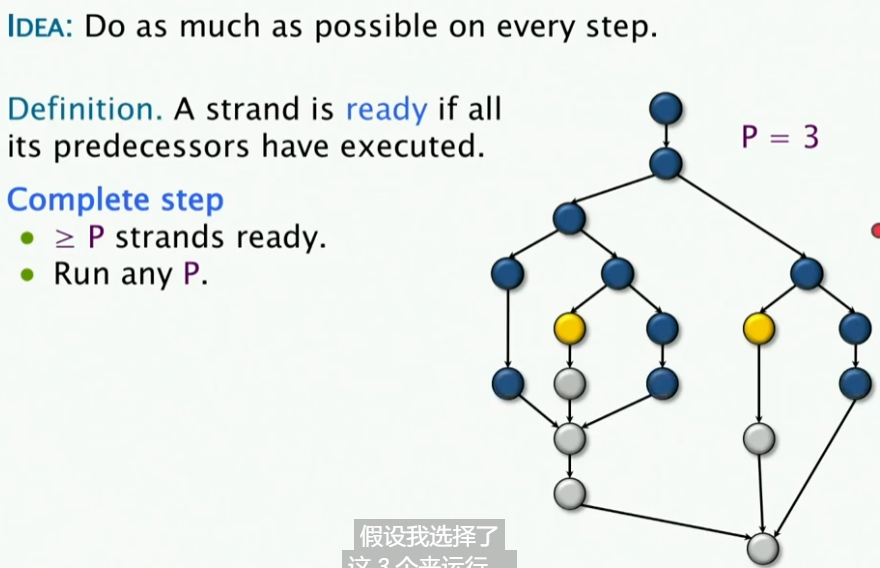
贪心调度的思想就是在每一步都尽量做更多的计算工作
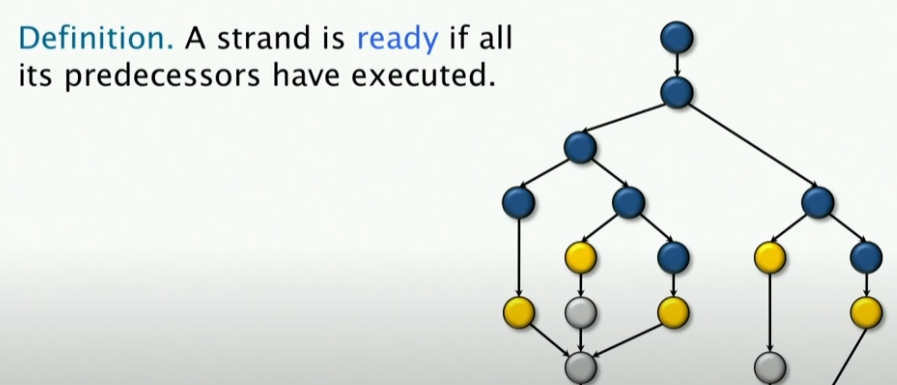
- 我们定义一个Strand为Ready状态当其所有的父节点都已经完成,这样的Strand就是Ready状态。
- 我们定义Complete step即有 的Strand,我们就称为Complete step
那么,对于一个贪婪调度算法, 它会在一个Complete step怎么做呢?——比如说我这里的P=3,那么它就会选择任意三个Strand去执行。假设我让下面这三个节点去运行,事实证明,这样的结果是很差的,因为它们无法让任何新的Strand变为Ready状态。 😕
- 我们继续定义Incomplete step,即有 的Strand,我们就称为Incomplete step,也就是类似上图中的状态
所以说,如果我这里有两个Ready Strand,有三个处理器,我应该在Incomplete Step做什么呢?——那么我们就简单地Run all of them,因为我处理器有三个,而我只有两个Ready Strand,因此我就让这两个Ready Strand去运行。不需要竞争调度。 😕
然后,我们使用Complete Step和Incomplete Step去分析贪婪调度下的性能:
该公式的简单证明如下:
- 首先Complete Steps (针对有多少个这样的状态)不会超过 ,这是很显然的
- 然后Incomplete Steps不会超过,这也是显然的,因为如果我们执行了一次Incomplete Steps,那么这个图(DAG)的最长路径就会减少一个节点,因此不会超过
因此,我们可以得到上述的公式。正好是两个边界之和。
Optimality of Greedy
对于上述公式有一个推断,就是任何的贪婪调度都能在两倍之内的最优调度时间内(Optimal Running time)实现。
(所谓Optimal Running time,即知道一切未来情况,分析得到的最优解)
由之前的这两个Laws,我们可以得到下述结论:
- Work Law
- Span Law
,在这个公式中,$$T_P^{*}$$是最优调度时间,即Optimal Running time。
因此我们就有:
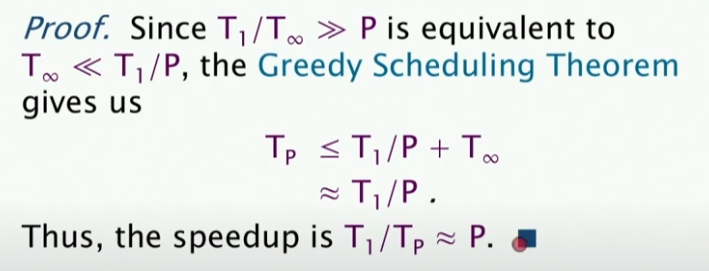
Linear Speedup
另一个关于贪婪的推论是,如果当,那么这个贪婪调度将会得到接近线性的加速比。
后面的课程将会更加偏向于算法,下一节将会涉及分治递归,希望我准备好了 😇 😇
 wechat
wechat alipay
alipay